Publication of the LUDO paper in IEEE Transaction on Robotics (T-RO)
We are pleased to share that our paper, “LUDO: Low-Latency Understanding of Deformable Objects using Point Cloud Occupancy Functions,” has been accepted for publication in the IEEE Transactions on Robotics.
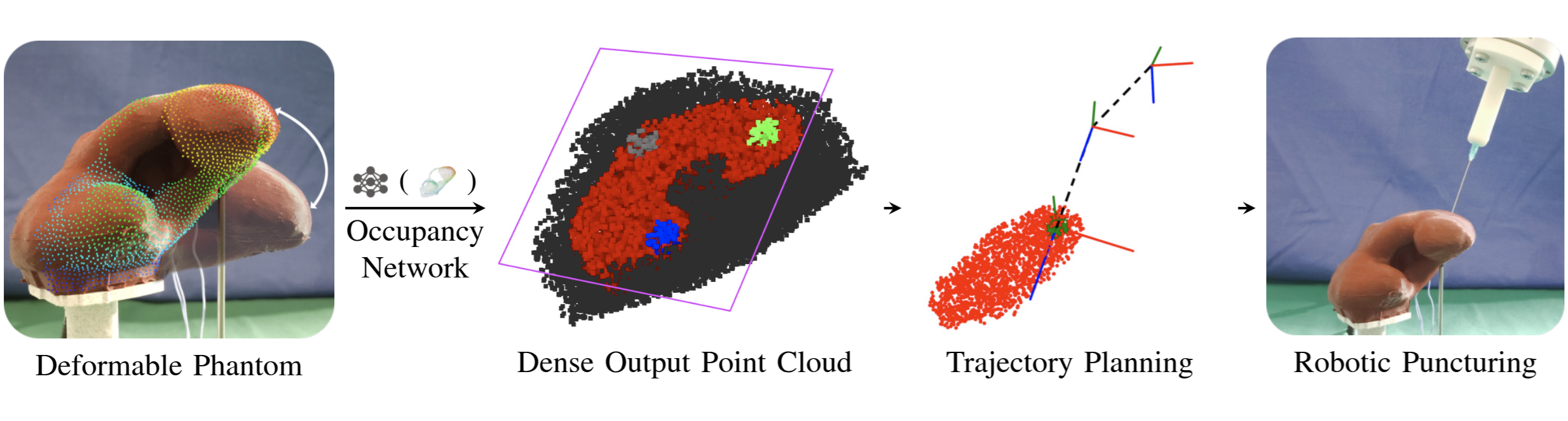
In this work, we present LUDO, a method for low-latency understanding of deformable objects from point cloud data. Unlike traditional approaches that rely on fitting prior models to new observations, LUDO directly estimates the object’s structural state without requiring a registration step.
LUDO achieves sub-30 ms inference times and integrates uncertainty estimation, enabling it to flag ambiguous or insufficient inputs (an important capability for robotics applications involving deformable objects). We demonstrate the method’s precision through experiments in real-world autonomous puncturing tasks, achieving a 98.9% success rate.